Plugin: sensors
This plugin provides basic and advanced models for defining sensor models for environment perception and ego localization.
LiDAR Simulation
Interpolation of ranges between pixels is typically out of the question in the given application: Changes in range across the sensor’s field of view commonly stem from distinct objects at different depths, where no continuous transition can be assumed (as opposed to, for example, terrain models). Interpolation will thus generate intermediate “ghost points” between targets, whereas LiDAR systems will typically only yield ranges at which actual targets exist in the scene. The scale of the resulting errors is limited only by the maximum distance of the objects in the scene.
Parameters
kernelSize: Large kernel sizes increase computation time a lot , but required for large blooming effects.
w: Kronecker delta weight
bloomVarianceXDeg: variance of beam in x direction in degrees
bloomVarianceYDeg: variance of beam in y direction in degrees,
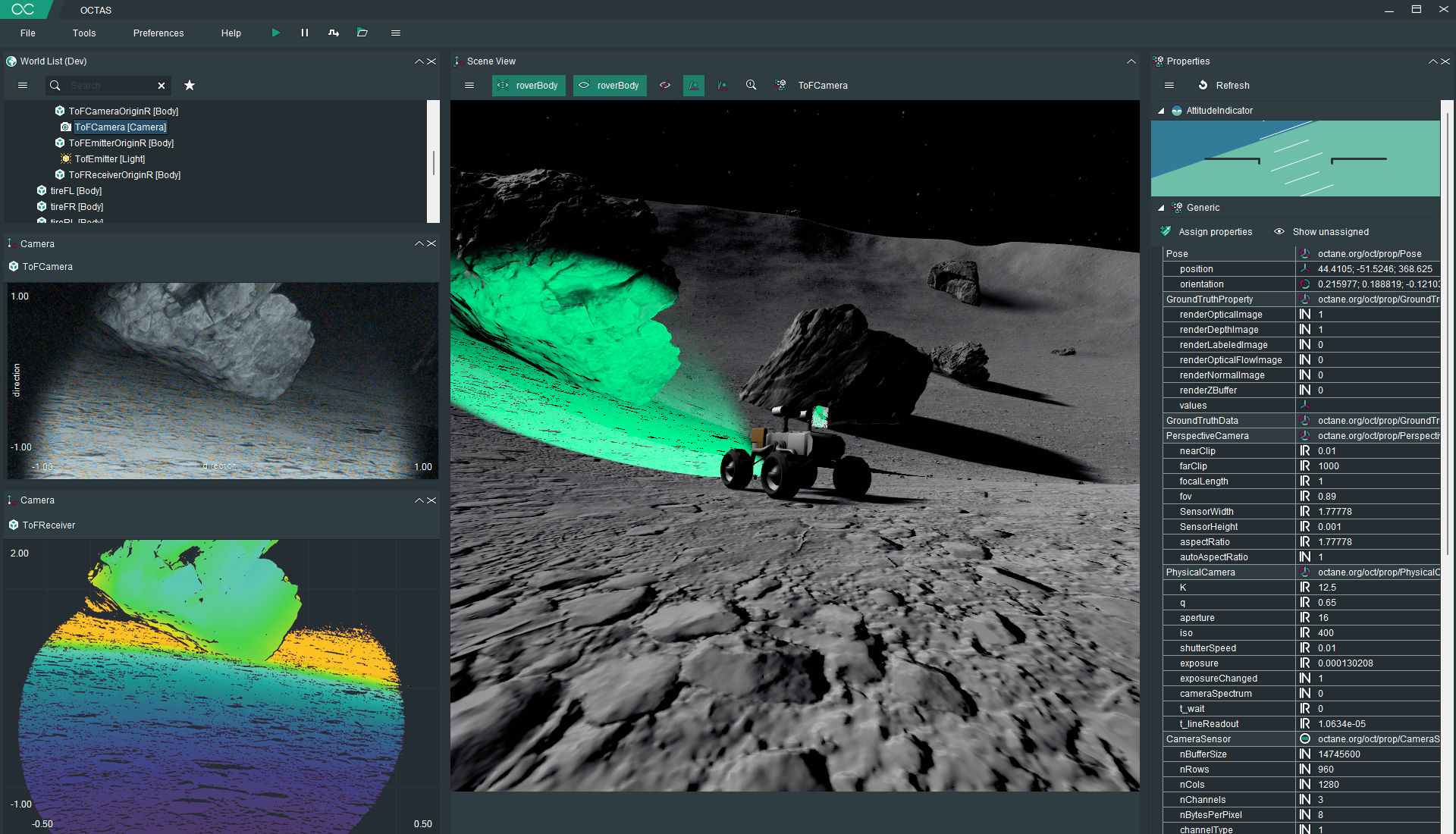
computePointCloud: 1 Trigger the computation of one point cloud. After that it will be set to zero again.
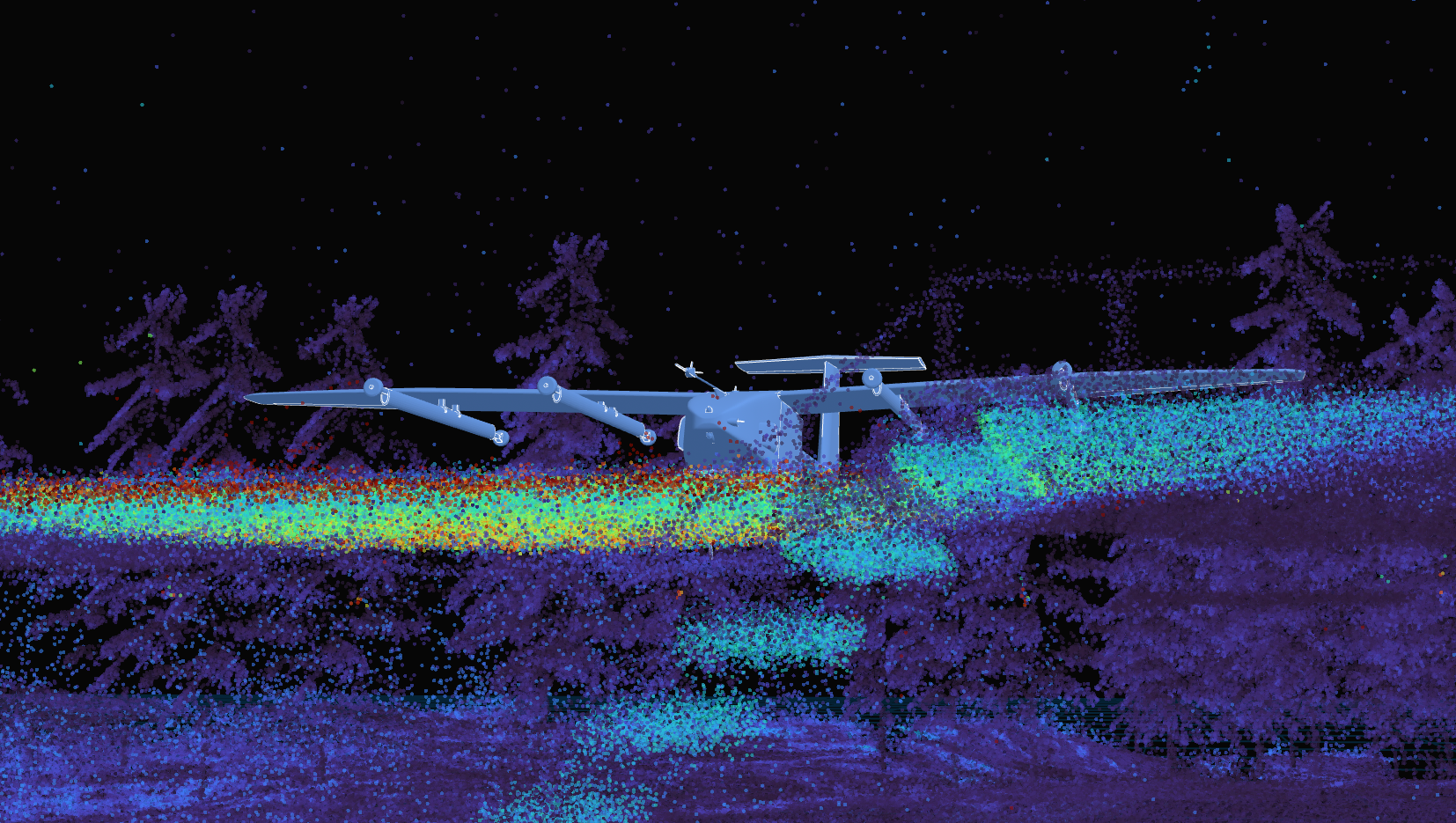
colorMap: color point clouds numbers accoridng to: Parula, Heat, Jet, Turbo, Hot, Gray, Magma, Inferno, Plasma, Viridis, Cividis, Github, Cubehelix
Calibration
As the model is calibrated against the laboratory measurements through defined targets and goniometer, the strong match between the resulting real and synthetic point clouds provides limited insight into the validity of the model. To demonstrate the pipeline in whole and independently, the simulation is applied to real-world data recorded by a Scala Gen. 2 mounted to a research vehicle. In this use case, the limitation is that world properties (geometries and BRDFs) are only approximated in the simulation, enabling mainly qualitative rather than quantitative comparisons. Yet, the presence or absence of effects provides insight into model limitations.
Requires
- plug::stdlib 0.9+
Provides
Steppers
- step::LidarStepper
- step::RGBDLidarStepper
- step::IMUStepper
- step::GPSStepper
Properties
- prop::LidarCtrl
- prop::IMU
- prop::GPS
- prop::LastPosition
- prop::LastLinearVelocity
- EnuToGeoLocParam
Flow nodes
- (none)